工業(yè)智能機(jī)器人解決方案提供商!


-
新聞資訊
-
關(guān)于新寶
 語言 ▼
語言 ▼

玻璃制品機(jī)器人力控打磨是一項(xiàng)精細(xì)的工藝過程,它涉及到使用機(jī)械臂配合高精度的力控技術(shù)來對玻璃表面進(jìn)行打磨和拋光。在這一過程中,力控系統(tǒng)能夠?qū)崟r(shí)監(jiān)測和調(diào)整施加在玻璃
更多
石材智能機(jī)器人打磨技術(shù)是利用先進(jìn)的自動(dòng)化設(shè)備對石材表面進(jìn)行精細(xì)加工的過程。這種技術(shù)可以提高石材加工的精度和效率,減少人工成本,并確保打磨效果的一致性和高質(zhì)量。石
更多
金屬制品機(jī)器人力控打磨是一種利用機(jī)器人技術(shù)進(jìn)行金屬表面處理的方法。通過編程和控制,機(jī)器人可以精確地執(zhí)行打磨任務(wù),提高打磨質(zhì)量和效率。力控打磨系統(tǒng)能夠根據(jù)金屬表面
更多
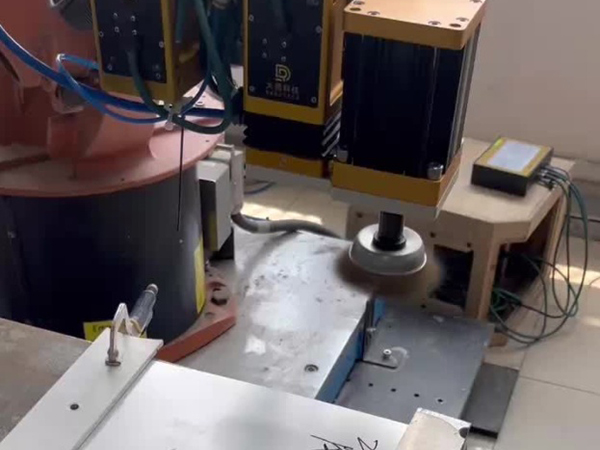
箱體智能機(jī)器人打磨系統(tǒng)是一種先進(jìn)的自動(dòng)化設(shè)備,它利用機(jī)器人技術(shù)對箱體類零件進(jìn)行打磨作業(yè)。該系統(tǒng)通常包括機(jī)器人本體、打磨工具、控制系統(tǒng)以及安全防護(hù)裝置。通過編程和
更多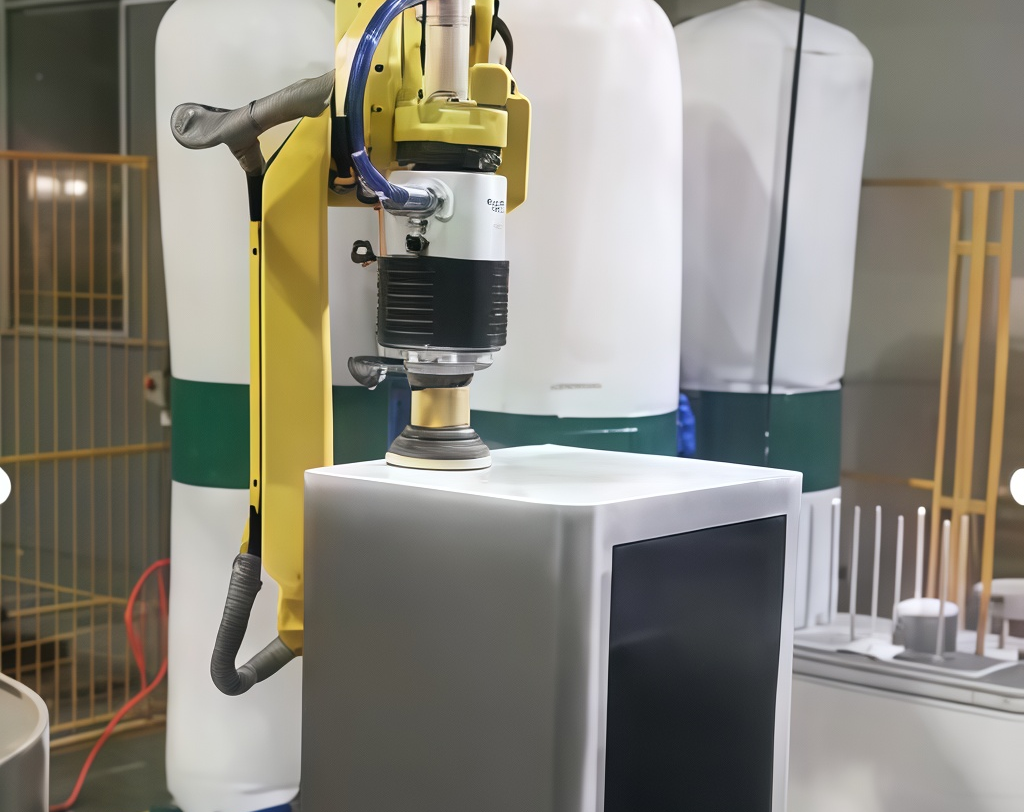
3C行業(yè)機(jī)器人力控打磨是指在計(jì)算機(jī)、通信和消費(fèi)電子產(chǎn)品制造領(lǐng)域中,利用機(jī)器人技術(shù)實(shí)現(xiàn)對產(chǎn)品表面進(jìn)行精細(xì)打磨的過程。這種技術(shù)通過精確控制機(jī)器人的力量和運(yùn)動(dòng),確保打
更多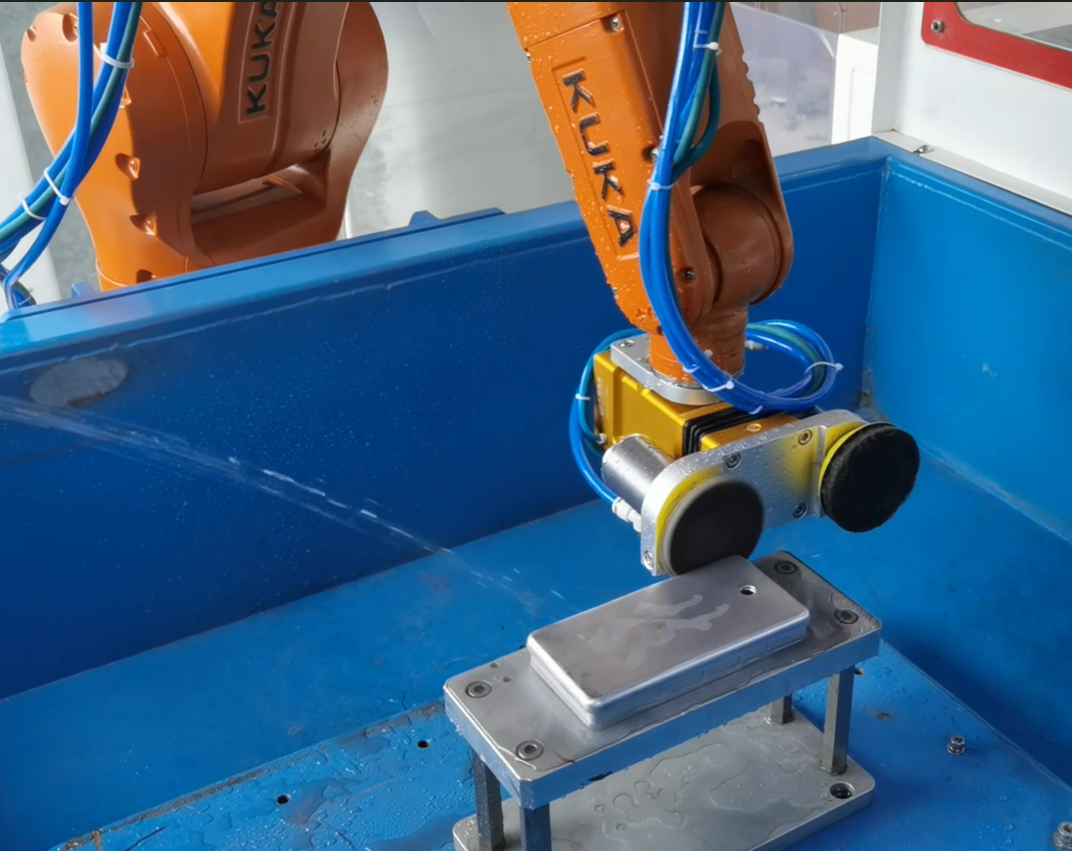
協(xié)作機(jī)器人面向小零件組裝的解決方案:是一個(gè)雙臂機(jī)器人,主要用于小組件及元器件的組裝。整個(gè)裝配解決方案包括自適應(yīng)的手、靈活的零部件上料機(jī)、控制力傳感、視覺指導(dǎo)和ABB的監(jiān)控及軟件技術(shù)。
更多

機(jī)器人能夠提供一致且高質(zhì)量的打磨效果,減少人為操作的不穩(wěn)定性。其次,它們可以連續(xù)工作,不受疲勞影響,提高生產(chǎn)效率。
更多
搬運(yùn)機(jī)器人是可以進(jìn)行自動(dòng)化搬運(yùn)作業(yè)的工業(yè)機(jī)器人。較早的搬運(yùn)機(jī)器人出現(xiàn)在1960年的美國,Versatran和Unimate兩種機(jī)器人用于搬運(yùn)作業(yè)。搬運(yùn)作業(yè)是指用一種設(shè)備握持工件,是指從一個(gè)加工位置移到另一個(gè)加工位置。
更多
免示教編程焊接機(jī)器人與機(jī)器人行走軌道相結(jié)合時(shí),可以實(shí)現(xiàn)更高效的協(xié)同作業(yè)。機(jī)器人可以根據(jù)預(yù)設(shè)的軌道和焊接路徑進(jìn)行自動(dòng)化作業(yè),無需人工干預(yù)和調(diào)整,大大提高了焊接作業(yè)的效率。同時(shí),由于焊接路徑和參數(shù)是自動(dòng)生成的,因此也提高了焊接的精度和質(zhì)量。
更多
推廣焊接和切割自動(dòng)化相關(guān)技術(shù)。
? 24小時(shí)內(nèi)回復(fù)
? 現(xiàn)場調(diào)試
? 售后服務(wù)人員提供周到服務(wù)
? 官方網(wǎng)站: www.tsjhqc.com
Copyright ? 2024 新寶機(jī)器人科技(南通)有限公司 All Rights Reserved | 蘇ICP備19061139號

