


全模塊機器人焊接解決方案。模型導入/逆向建模+專家算法驅動的離線編程基于實時操作系統的控制內核前饋與反饋結合的焊縫跟蹤系統自研3D幾何建模引擎結合場景自適應的視
更多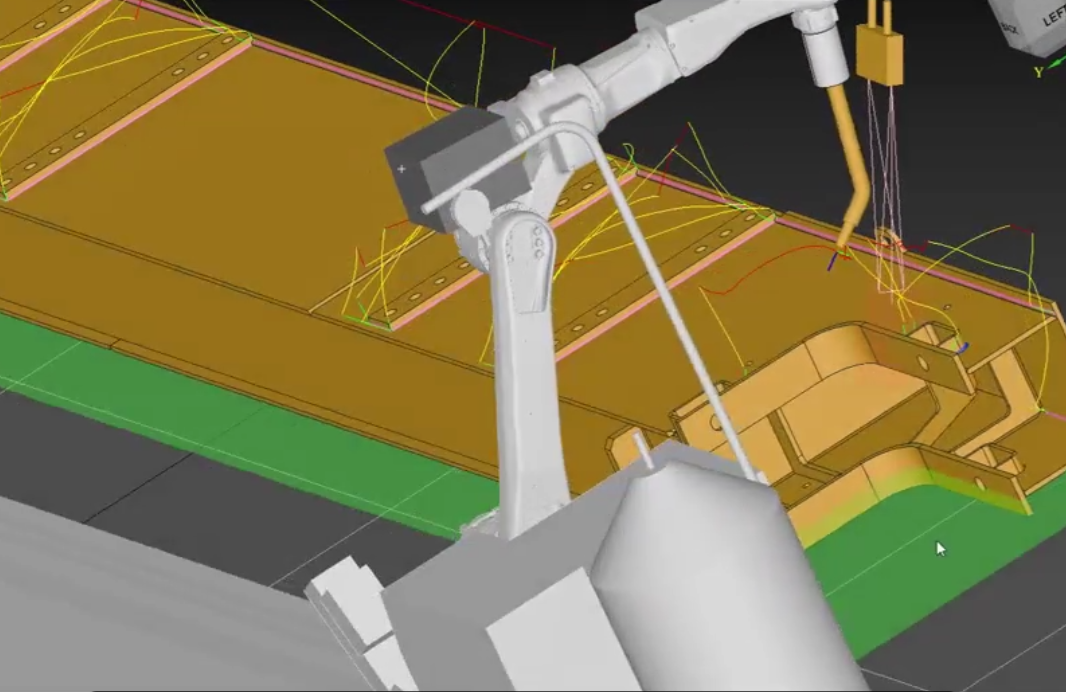
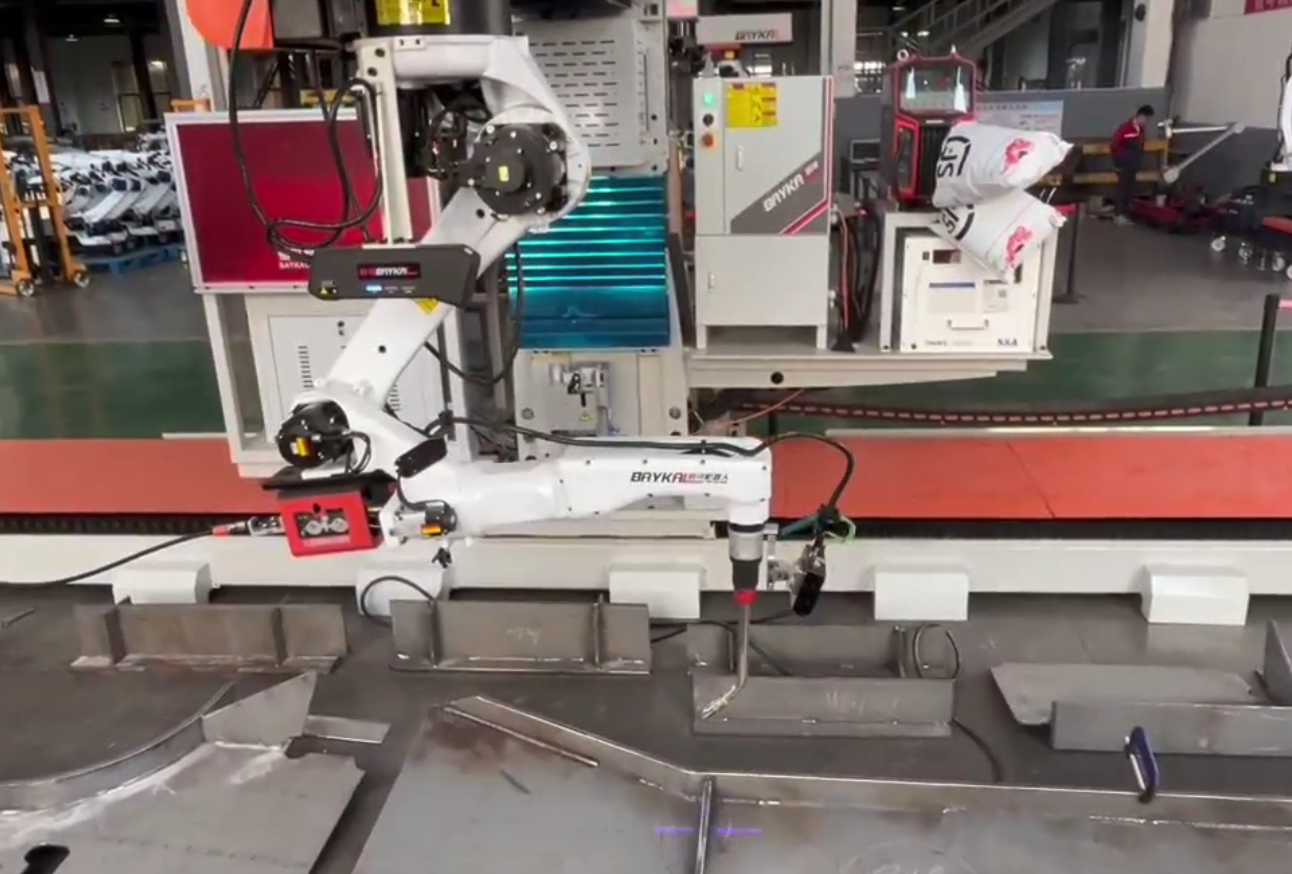
免示教編程焊接機器人與機器人行走軌道相結合時,可以實現更高效的協同作業。機器人可以根據預設的軌道和焊接路徑進行自動化作業,無需人工干預和調整,大大提高了焊接作業的效率。同時,由于焊接路徑和參數是自動生成的,因此也提高了焊接的精度和質量。
更多
離心風機葉輪自動化焊接工作站由焊接機器人系統、雙軸變位器、激光視覺引導系統、焊接系統組成。本設備用于替代人工完成離心風機葉輪自動化焊接,焊接過程中不需要人工干預,人工操作只需要焊接前的上料、和焊接后的下料,焊接軌跡由激光視覺引導實現自動化引導,焊接高度、前后、左右、姿態旋轉自動調節。
更多





焊接自動化用焊接方法連接的接頭稱為焊接接頭,它主要起連接和傳遞力的作用。焊接接頭由焊縫、熔合區和熱影響區三部分組成,對接接頭的焊前準備工作簡單,裝配方便,焊接變形和殘余應力較小,因而在工地安裝接頭和不重要的結構上時常采用。
更多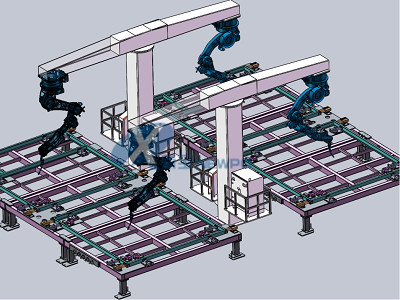
共1頁 10條
推廣焊接和切割自動化相關技術。
? 24小時內回復
? 現場調試
? 售后服務人員提供周到服務
? 官方網站: www.tsjhqc.com
Copyright ? 2024 新寶機器人科技(南通)有限公司 All Rights Reserved | 蘇ICP備19061139號

